一种欠驱动自调节的山地果园自动除草机器人
本发明属于机器人领域,尤其涉及一种欠驱动自调节的山地果园自动除草机器人。
背景技术:
1、果园产业是我国的重要产业,但是果园一般位于山地丘陵地区,不适合传统机械作业。山地丘陵果园路面大多不平整,存在沟壑和坡度等复杂路面,不利于机械行走;而且果树行间会有许多杂草,杂草会与果树争夺阳光和土壤中的水分、养分等,影响果树的生长,导致果蔬产量下降和果实品质受损。因此,需要对山地果园中的杂草进行及时的清除。
2、大多数果园除草机采用行间固定行走路线的方式进行作业,这就使得果树株间的杂草不能被有效去除,尤其是果树周围的杂草不能被割除,能够实现果园株间除草的设备多为人工背负除草机进行除草作业,该类型的除草工作效率低、人工消耗大、除草率低,果树周围的杂草仍需要人工拔除。
3、cn116849017a公开了一种适用于丘陵山区果园除草的仿形避障除草装置及方法,包括:升降驱动机构、仿形机构和割草装置;仿形机构包括自适应弹簧、仿形机构底座、角度调节杆和升降调节杆;仿形机构底座的下方通过自适应弹簧连接割草装置;仿形机构底座的上方连接角度调节杆和升降调节杆;升降调节杆的连接升降驱动机构,角度调节杆连接升降调节杆;升降驱动机构驱动升降调节杆运动,带动仿形机构底座实现上升或下降;通过调节角度调节杆的长度调节仿形机构底座的倾斜角度;通过仿形机构底座的倾斜和升降对自适应弹簧的进行调节,从而对割草装置的高度进行调整。但是,该技术方案存在升降调节高度不连续,离散性强,对不同地形的适应性差等问题。
4、因此,本领域技术人员提供了一种欠驱动自调节的山地果园自动除草机器人,以解决上述背景技术中提出的问题。
技术实现思路
1、为了解决现在山地丘陵地区果园存在无法进行大规模机械除草和现有机械除草效率低问题,本申请提供了一种欠驱动自调节的山地果园自动除草机器人,可对山地果园行间的杂草进行清除,除草作业效率高,除草滚刷适应性强,工作时运行稳定性好,对山地路面高低起伏的适应性强,使用灵活,安装和拆卸方便的除草毛刷。
2、为了实现上述目的,本发明采用以下技术方案:
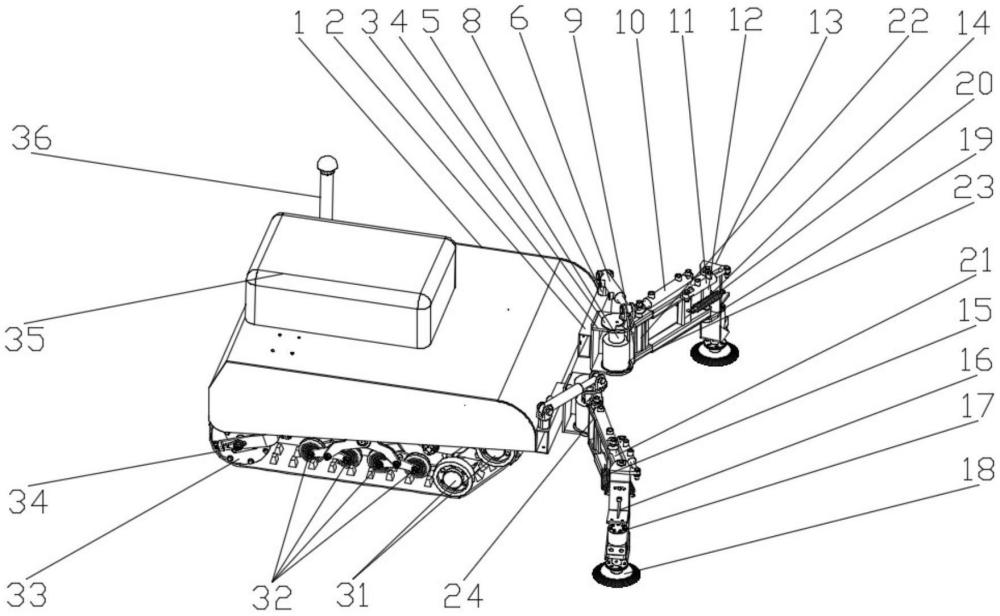
3、一种欠驱动自调节的山地果园自动除草机器人,包括:滚刷壳体、固定块、连接块、固定块连接件、天线、履带、动力轮、张紧轮组、行走轮组、控制箱、螺旋上升机构、伸缩臂、转动机构、弹簧一、弹簧二、电机和除草毛刷;所述动力轮通过旋转轴与驱动电机相连;所述张紧轮组由八个张紧轮对称排列组成,安装于履带内侧,相邻的张紧轮通过连接杆铰接;所述行走轮组由两个行走轮组成,安装于履带的前侧;两个除草毛刷安装在滚刷壳体的前侧,除草毛刷通过固定块安装在滚刷壳体前侧的安装槽内。
4、所述螺旋上升机构包括旋转轴、滑动轴承一、滑动轴承二、液压机构和限位机构;旋转轴上设置有螺旋轨道,所述螺旋轨道为“s”型轨道,“s”型轨道加工在圆柱形的旋转轴的外表面上。
5、所述螺旋上升机构的旋转动力由液压机构提供,液压机构为液压推杆一,旋转轴外面由固定罩包裹,固定罩上方设置圆锥弧形耳片,液压推杆一的一端与旋转轴上方的圆锥弧形耳片相连,液压推杆一的另一端通过螺栓固定在连接块上。
6、所述限位机构为限制片,限制片的活动夹角为170°,限制片为凸起结构,由两个不同大小的扇形结构同心对接而成,其中,小扇形结构的圆心角的优角为170°。
7、所述除草毛刷为橡胶材质。
8、所述伸缩臂为两组,一组与螺旋上升机构固定,一组与转动机构连接;两组伸缩臂均通过内部滑道相连接,动力由液压推杆二提供。
9、所述转动机构由连接耳片、转动轴和电机连接件组成,所述转动机构的动力由液压推杆三提供,转动轴通过轴侧固定连接在电机连接件上,电机连接件通过螺母与伸缩臂固定。
10、所述液压推杆三的一端铰接在伸缩臂的上支撑杆外部的固定杆支撑管的一侧,另一端铰接在电机连接件的一侧。
11、所述伸缩臂包括下伸缩杆、上支撑杆、下固定杆和上伸缩杆;其中,下固定杆和上支撑杆为固定端,而下伸缩杆和上伸缩杆为伸缩端。
12、欠驱动自调节的山地果园自动除草机器人的工作过程如下:
13、准备工作时,欠驱动自调节的山地果园自动除草机器人通过导航系统进行初始位置定位,动力轮通过履带带动行走轮组,运动到起始位置,除草毛刷展开;
14、当除草毛刷进入工作环境后,液压推杆一开始收缩,滑动轴承一、滑动轴承二沿旋转轴的螺旋轨道向下运动,带动圆锥弧形连接耳片沿限制片限定的轨道向滚刷壳体运动,电机工作,除草毛刷除草;
15、当除草毛刷的外侧碰到障碍物时,外侧将产生压力,液压推杆三受力后伸长,除草毛刷的位置向内倾斜;当除草毛刷内侧碰到障碍物时,内侧将产生压力,液压推杆三受力后收缩,除草毛刷的位置向外倾斜;
16、当工作完成时,当液压推杆一伸长,推动旋转机构时,滚动轴承受力沿螺旋轨道向上运动,伸缩臂受力慢慢向上抬起,当运动到扇形结构与水平线一侧夹角为175°时,伸缩臂将除草毛刷抬起到极限位置,与除草机器人壳体表面等高,除草毛刷完成回收。
17、本申请的技术效果如下:
18、1.本申请的螺旋上升机构通过旋转轴、螺旋轨道、滑动轴承一、滑动轴承二、液压机构、限位机构的配合能够实现除草毛刷高度的无级调节,提高了除草毛刷的适应性,工作时运行稳定性好,对山地路面高低起伏的适应性强。
19、2.本申请的螺旋上升机构的顶部设置有限位机构,限位机构为限制片,活动夹角为170°,限制片为凸起结构,凸起结构起到限位作用,通过上述限制,螺旋上升机构不会在工作过程中出现死点,可以保证除草毛刷旋转和上升动作的平稳运行。
20、3.本申请的螺旋上升机构的动力输出元件为1个,同时控制上升和旋转两个不同方向的运动,提高了液压推杆的利用效率,实现了欠驱动调节。
21、4.本申请的液压推杆三独立设置,在发生碰撞受到外力时,除草毛刷向受力方向发生摆动,避免与障碍物发生碰撞,保证结构的稳定性,通过除草毛刷的自身结构特性来避免与障碍物发生硬接触,通过由于毛刷自身具有一定的长度,在避开障碍物的同时,仍然可以将障碍物附近的杂草清除,通过障碍物位置后,除草毛刷将自动复位,继续工作。液压推杆三的推力设定为固定值,不进行主动调节,能保证结构稳定且受力可变化。液压推杆三可以随外部受力进行收缩和伸长,调节具体除草毛刷的角度,避免与树干和石块等异物发生碰撞。
22、5.本申请通过弹簧一和弹簧二的同时作用,能够保持碰撞时的结构稳定性,同时,起到减震的作用,保证欠驱动调节工作正常的进行。
23、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种欠驱动自调节的山地果园自动除草机器人,其特征在于,包括:滚刷壳体、固定块、连接块、固定块连接件、天线、履带、动力轮、张紧轮组、行走轮组、控制箱、螺旋上升机构、伸缩臂、转动机构、弹簧一、弹簧二、电机和除草毛刷;所述动力轮通过旋转轴与驱动电机相连;所述张紧轮组由八个张紧轮对称排列组成,安装于履带内侧,相邻的张紧轮通过连接杆铰接;所述行走轮组由两个行走轮组成,安装于履带的前侧;两个除草毛刷安装在滚刷壳体的前侧,除草毛刷通过固定块安装在滚刷壳体前侧的安装槽内。
2.根据权利要求1所述的一种欠驱动自调节的山地果园自动除草机器人,其特征在于,所述螺旋上升机构包括旋转轴、滑动轴承一、滑动轴承二、液压机构和限位机构;旋转轴上设置有螺旋轨道,所述螺旋轨道为“s”型轨道,“s”型轨道加工在圆柱形的旋转轴的外表面上。
3.根据权利要求2所述的一种欠驱动自调节的山地果园自动除草机器人,其特征在于,所述螺旋上升机构的旋转动力由液压机构提供,液压机构为液压推杆一,旋转轴外面由固定罩包裹,固定罩上方设置圆锥弧形耳片,液压推杆一的一端与旋转轴上方的圆锥弧形耳片相连,液压推杆一的另一端通过螺栓固定在连接块上。
4.根据权利要求2所述的一种欠驱动自调节的山地果园自动除草机器人,其特征在于,所述限位机构为限制片,限制片的活动夹角为170°,限制片为凸起结构,由两个不同大小的扇形结构同心对接而成,其中,小扇形结构的圆心角的优角为170°。
5.根据权利要求1所述的一种欠驱动自调节的山地果园自动除草机器人,其特征在于,所述除草毛刷为橡胶材质。
6.根据权利要求1所述的一种欠驱动自调节的山地果园自动除草机器人,其特征在于,所述伸缩臂为两组,一组与螺旋上升机构固定,一组与转动机构连接;两组伸缩臂均通过内部滑道相连接,动力由液压推杆二提供。
7.根据权利要求6所述的一种欠驱动自调节的山地果园自动除草机器人,其特征在于,所述转动机构由连接耳片、转动轴和电机连接件组成,所述转动机构的动力由液压推杆三提供,转动轴通过轴侧固定连接在电机连接件上,电机连接件通过螺母与伸缩臂固定。
8.根据权利要求7所述的一种欠驱动自调节的山地果园自动除草机器人,其特征在于,所述液压推杆三的一端铰接在伸缩臂的上支撑杆外部的固定杆支撑管的一侧,另一端铰接在电机连接件的一侧。
9.根据权利要求6所述的一种欠驱动自调节的山地果园自动除草机器人,其特征在于,伸缩臂包括下伸缩杆、上支撑杆、下固定杆和上伸缩杆;其中,下固定杆和上支撑杆为固定端,而下伸缩杆和上伸缩杆为伸缩端。
10.如根据权利要求1-9任一项所述的一种欠驱动自调节的山地果园自动除草机器人的工作方法,其特征在于,
技术总结
本发明属于机器人领域,尤其涉及一种欠驱动自调节的山地果园自动除草机器人,包括:滚刷壳体、固定块、连接块、固定块连接件、天线、履带、动力轮、张紧轮组、行走轮组、控制箱、螺旋上升机构、伸缩臂、转动机构、弹簧一、弹簧二、电机和除草毛刷;所述张紧轮组由八个张紧轮对称排列组成,安装于履带内侧,相邻的张紧轮通过连接杆铰接;所述行走轮组由两个行走轮组成,安装于履带的前侧;两个除草毛刷安装在滚刷壳体的前侧,除草毛刷通过固定块安装在滚刷壳体前侧的安装槽内。本发明能够实现除草毛刷高度的无级调节,提高了除草毛刷的适应性,工作时运行稳定性好,对山地路面高低起伏的适应性强,实现了欠驱动调节。
技术研发人员:梁静,马天磊,辛璐,朱民杰,岳湘,王林
受保护的技术使用者:郑州大学
技术研发日:
技术公布日:2024/9/2
技术研发人员:梁静,马天磊,辛璐,朱民杰,岳湘,王林
技术所有人:郑州大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除